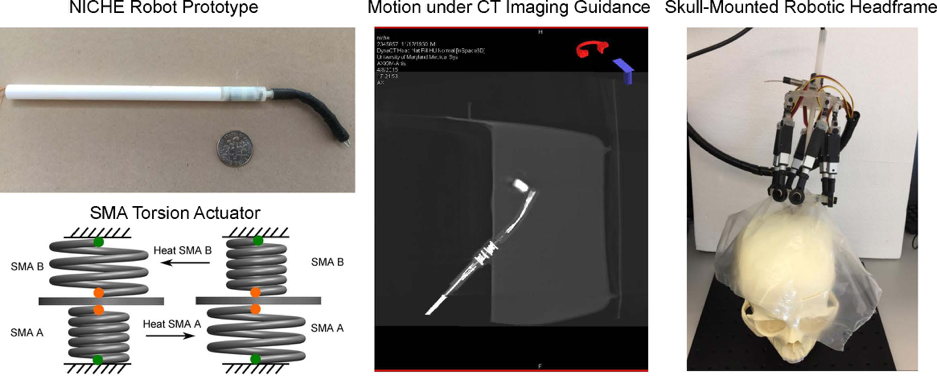
A significantly large population is affected by intracerebral hemorrhage and less than 40% of them can survive the first year. Our group is developing an image-guided robotic system for the immediate removal of intracerebral hemorrhage in a minimally invasive approach. The developed meso-scale robot name NICHE is capable of articulating its tip when performing electrocauterization and suction within hemorrhage for improved performance. The NICHE robot is equipped with a bending tip and a torsion joint, which are formed by a pair of antagonistic shape memory alloy (SMA) wires and SMA torsion springs, respectively. By characterizing the SMA actuators and developing a model-based controller, the NICHE robot can achieve high positioning accuracy. Under CT imaging guidance, the NICHE robot has been experimentally evaluated using phantom tissue. We have also developed a skull-mounted robotic headframe for guiding the NICHE robot in neurosurgery. The headframe is comprised of a pedestal, a Stewart platform, and a linear motion module. After mounting the headframe interfacing with the NICHE robot on the skull, the headframe can align the NICHE robot with the planned target and entry hole.
Dheeraj Gandhi, Rao Gullapalli, J. Marc Simard, and Jaydev P. Desai