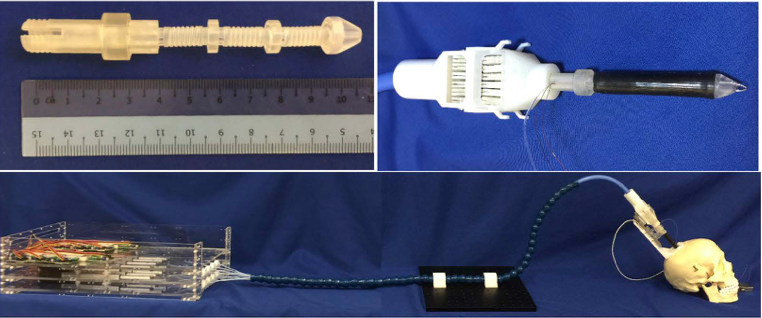
Brain cancer is currently one of the leading causes of cancer deaths among children and adults. Surgical robots that provide precision and the ability to go beyond the line-of-sight are being explored to perform complete brain tumor removal that would improve the survival rate and post-surgery quality of life of brain tumor patients. This project aims at developing a meso-scale flexible robot that can be guided under magnetic resonance image (MRI) to enter the patient’s brain through a small incision in the skull and perform tumor removal procedure. MRI is the chosen imaging modality due to its superior soft tissue contrast. Despite its limited size, the robot is equipped with electrocautery probes, suction tube, and irrigation tube required for the surgical procedure. It consists of three spring segments, has six degrees-of-freedom, and is completely 3-D printed and thus can be patient-specific. A remotely actuated setup has been developed using Bowden cables to move the robot. A quick connect mechanism has also been developed to allow the disposable robot to be removed and replaced easily. A stiffness tunable version of the robot has also been developed by replacing the plastic springs segments with shape memory alloy (SMA) springs. By adjusting the temperature of the SMA spring segments, the stiffness of each robot segment can be independently modulated, thereby improving the stability of the flexible robot during the surgical procedure.
Jaydev P. Desai, Rao P. Gullapalli, and J. Marc Simard