The EPIC Lab is focused on the design and control of prosthetic and orthotic systems. There are currently three main ongoing projects in the EPIC Lab: a dual actuated knee ankle prosthesis, a powered hip exoskeleton and a pediatric knee exoskeleton. These projects are aimed at developing clinically translatable research that can be deployed in the future, creating devices for a wide range of users from healthy subjects to patients with gait deficiencies. EPIC Lab research towards the extraction of user intent from human subjects and how to use this user intent to control prosthetic and orthotic devices.
Dual Actuated Knee Ankle Prosthesis
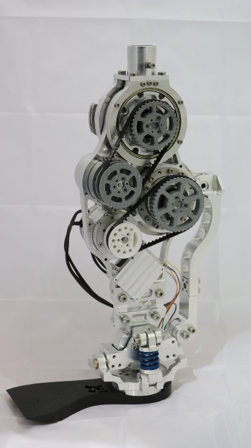
Individuals with transfemoral amputation are subjected to higher levels of exertion when using energetically passive prostheses. Powered prostheses have been proven to reduce this increased metabolic expenditure. The powered prosthesis in development at EPIC Lab uses two motors to provide powered torsion about the prosthetic knee and ankle. An especially interesting research question is how to transition between multiple ambulation modes using user intent. Our approach is to feed several mechanical and biopotential signals to high level controllers embedded in the device for the recognition of different gait modes and locomotion tasks.
Graduate Student Lab Members: Jonathan Camargo, Krishan Bhakta
Collaborators: Dr. Aaron Ames, Dr. Lee Childers, Robert Kistenberg, Eric Ambrose, Rachel Gehlhar, Maegan Tucker
Powered Hip Exoskeleton
EPIC Lab is currently in development of an exoskeleton device for hip assistance in lower limb movement. This device will be comprised with powered assistance in hip flexion/extension as well as passive joint for free movement in hip ab/adduction. Device will utilize series elastic actuator using a fiberglass leaf spring for more precise torque control. A novel high-level controller will be embedded to the exoskeleton device with several different mechanical sensors on the device for user independent intent recognition in different gait modes (stairs, ramps, ground level). The device will be used on wide range of users from healthy subjects to patients with gait deficiencies.
Graduate Student Lab Members: Inseung Kang, Claire Kilpatrick, Summer Lee
Collaborators: Dr. Geza Kogler
Pediatric Knee Exoskeleton
The purpose of the Pediatric Knee Exoskeleton device is to improve the knee biomechanics of children with pathological gait such as Genu Recurvatum and crouch gait. We aim to create a lightweight, low profile, and cost effective solution to treat gait abnormality associated with the knee. . We propose to introduce a wearable robotic knee exoskeleton to aid in restoring normal gait to assist children with impaired motor control in the lower extremity. By providing appropriate support and correcting pathophysiological gait biomechanics, an assistive knee robotic exoskeleton can help children to learn to walk efficiency and restore their mobility and independence. Our long-term goal from this product development is to bring exoskeleton technology to children across the nation to give them a richer quality of life, increased capability and improved health outcomes.
Graduate Student Lab Members: Dawit Lee, Eun Chan Kwak, Michelle Myrick
Collaborators: Dr. Geza Kogler, Dr. Benjamin Rogozinski, Dr. Erin Eggebrecht
Aaron Young